Pulidora robótica: acabado superficial automatizado de alta precisión





Diagrama detallado
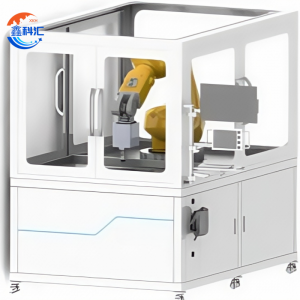

Visión xeral da máquina pulidora robótica
A máquina pulidora robótica é un sistema avanzado de procesamento de superficies totalmente automatizado deseñado para cumprir cos requisitos máis esixentes na fabricación de precisión. Combina control robótico de seis eixes, tecnoloxía de pulido por retroalimentación de forza e configuración de dobre cabezal para manexar unha ampla gama de materiais e xeometrías complexas cunha precisión e consistencia excepcionais.
Xa sexa para lentes ópticas, pezas aeroespaciais, compoñentes de enxeñaría de precisión ou aplicacións de semicondutores, esta máquina ofrece acabados superficiais estables, repetibles e de alta calidade, mesmo con tolerancias de nivel nanométrico.


Compatibilidade completa de pezas de traballo da máquina pulidora robótica
O sistema admite o procesamento de:
-
Superficies planaspara placas de vidro, cerámica e metal
-
Formas cilíndricas e cónicascomo rolos, eixes e tubos
-
Compoñentes esféricos e asféricospara sistemas ópticos
-
Superficies de forma libre e fóra de eixocon curvas e transicións complexas
A súa versatilidade faino axeitado paratanto a produción en masa como a fabricación personalizada de alta precisión.
Características e vantaxes principais da máquina pulidora robótica
1. Tecnoloxía de cabezal de pulido dual
-
Equipado conrotación únicaeautorrotacióncabezas de pulido para maior flexibilidade.
-
A capacidade de cambio rápido de ferramentas admite múltiples modos de procesamento sen longos tempos de inactividade.
-
Ideal para alternar entre as etapas de pulido groso e fino.
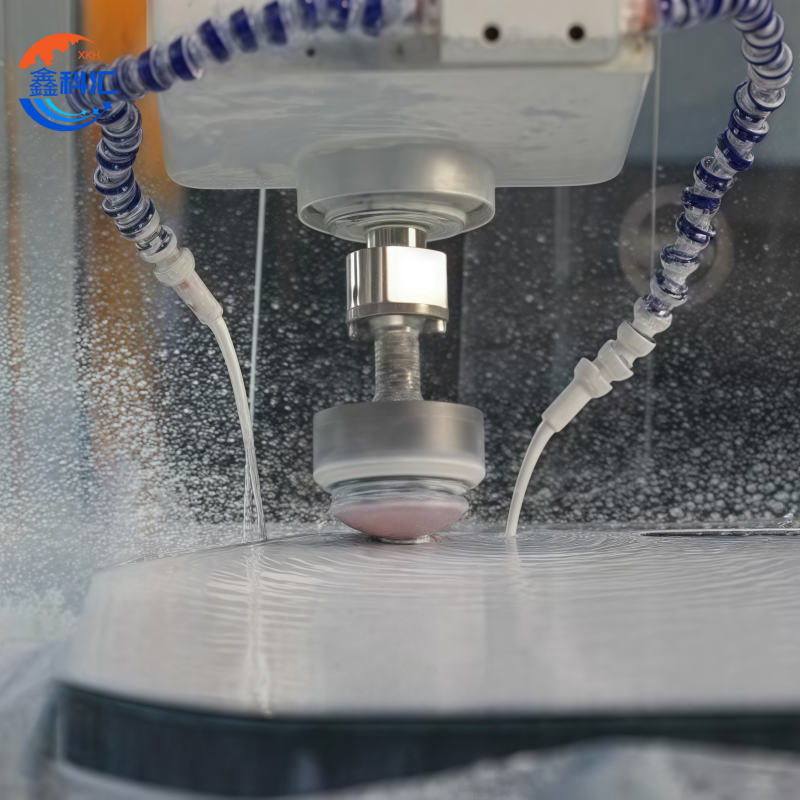
2. Sistema de control de forza de precisión
-
Monitorización en tempo real depresión, temperatura e fluxo de fluído de pulido.
-
A aplicación consistente da forza garante un acabado superficial uniforme en toda a peza de traballo.
-
Capaz de adaptarse automaticamente ás irregularidades da superficie.
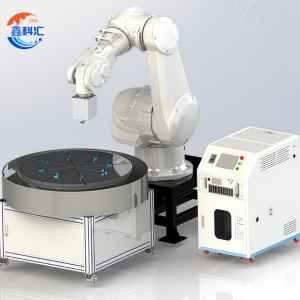
3. Control robótico de seis eixes
-
Total liberdade de movemento para manexar xeometrías complexas.
-
Traxectorias de movemento suaves e precisas calculadas mediante algoritmos avanzados.
-
Alta precisión de posicionamento repetitivo de ±0,04 mm a ±0,1 mm dependendo do modelo.
4. Automatización e medición intelixentes
-
Ferramentas de calibración automática para unha configuración e aliñamento precisos.
-
Sistema de medición de coordenadas para un posicionamento preciso.
-
Opcionalmonitorización de espesores en liñapara o control de calidade en tempo real.
5. Calidade de construción de grao industrial
-
O deseño de servomotor dual aumenta a eficiencia e a estabilidade do pulido.
-
A estrutura mecánica ríxida minimiza as vibracións e garante unha durabilidade a longo prazo.

Especificacións técnicas da máquina pulidora robótica
| Modelo de equipo | Corpo de robot | Precisión de posicionamento repetido | Rango de diámetro de procesamento | Cabezal de pulido de rotación única | Cabezal de pulido multirrotación | Ferramenta pequena | Pulido tipo roda principal | Pulido de cabeza esférica | Finalizar cambio rápido | Ferramenta de calibración automática | Cabezal de medición de coordenadas | Monitorización de espesores en liña | Plataforma de Control Numérico |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| IRP500S | Staubli TX2-90L | ±0,04 mm / rango completo | Φ50~Φ500mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP600S | Staubli TX2-140 | ±0,05 mm / rango completo | Φ50~Φ600mm | √ | × | √ | √ | √ | × | ○ | ○ | ○ | ○ |
| IRP800S | Staubli TX2-160 | ±0,05 mm / rango completo | Φ80~Φ800mm | √ | √ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000S | Staubli TX200/L | ±0,06 mm / rango completo | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP1000A | ABB IRB6700-200/2.6 | ±0,1 mm / rango completo | Φ100~Φ1000mm | √ | ○ | √ | √ | √ | ○ | ○ | ○ | ○ | ○ |
| IRP2000A | ABB IRB6700-150/3.2 | ±0,1 mm / rango completo | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
| IRP2000AD | ABB IRB6700-150/3.2 | ±0,1 mm / rango completo | Φ200~Φ2000mm | √ | ○ | √ | √ | √ | × | × | × | ○ | ○ |
Preguntas frecuentes: máquina pulidora robótica
1. Que tipos de pezas pode manexar a máquina pulidora robótica?
A nosa máquina pulidora robótica admite diversas formas e superficies, incluíndo contornos planos, curvos, esféricos, de forma libre e complexos. É axeitada para compoñentes ópticos, moldes de precisión, superficies metálicas e outras aplicacións de pulido de alta precisión.
2. Cal é a diferenza entre os cabezales de pulido de rotación única e multirrotación?
-
Cabezal de pulido de rotación únicaA ferramenta xira arredor dun único eixo, ideal para o acabado superficial estándar e a eliminación de material a alta velocidade.
-
Cabezal de pulido multirrotaciónA ferramenta combina a rotación coa autorrotación (órbita), o que permite un pulido máis uniforme en superficies curvas e irregulares.
3. Cal é o diámetro máximo de procesamento?
Dependendo do modelo:
-
Os modelos compactos (por exemplo, IRP500S) manexanΦ50–Φ500 mm.
-
Os modelos a grande escala (por exemplo, o IRP2000AD) soportan ataΦ2000 mm.
Sobre nós
XKH especialízase no desenvolvemento, produción e venda de alta tecnoloxía de vidro óptico especial e novos materiais de cristal. Os nosos produtos utilízanse para electrónica óptica, electrónica de consumo e o ámbito militar. Ofrecemos compoñentes ópticos de zafiro, cubertas para lentes de teléfonos móbiles, cerámica, LT, carburo de silicio SIC, cuarzo e obleas de cristal semicondutor. Con experiencia cualificada e equipos de vangarda, destacamos no procesamento de produtos non estándar, co obxectivo de ser unha empresa líder en materiais optoelectrónicos de alta tecnoloxía.

Produtos relacionados
-

Produtos de obleas de substrato SiC 4H-semi HPSI de 2 polgadas...
-
Caixa de transporte cadrada personalizada, caixa de transporte, xanela cadrada...
-

Oblea de substrato SiC HPSI de 6 polgadas de carburo de silicio...
-

Corindón de zafiro para pedras preciosas cristal de Al2O3...
-

Pulido de substrato de monocristal de metal de aluminio...
-

Oblea revestida de Au, oblea de zafiro, oblea de silicio...